Optical budget in a Maya’s scene
Disparity measurements.
In a stereoscopic project, whatever it may be, glass or otherwise (e.g. autostereoscopic monitors), I think the most important feature is disparity control.
When I started studying stereoscopy in 2009, Maya’s camera stereo rig didn’t exist and I needed something to help me realise an “off-axis” rig. See also: https://www.maurizioturoni.eu/old_site/cameraRigE.php
In the end I made a four camera rig that produces two stereo pairs of images, so I can handle the background with different stereo parameters like zero plane and distance between cameras.
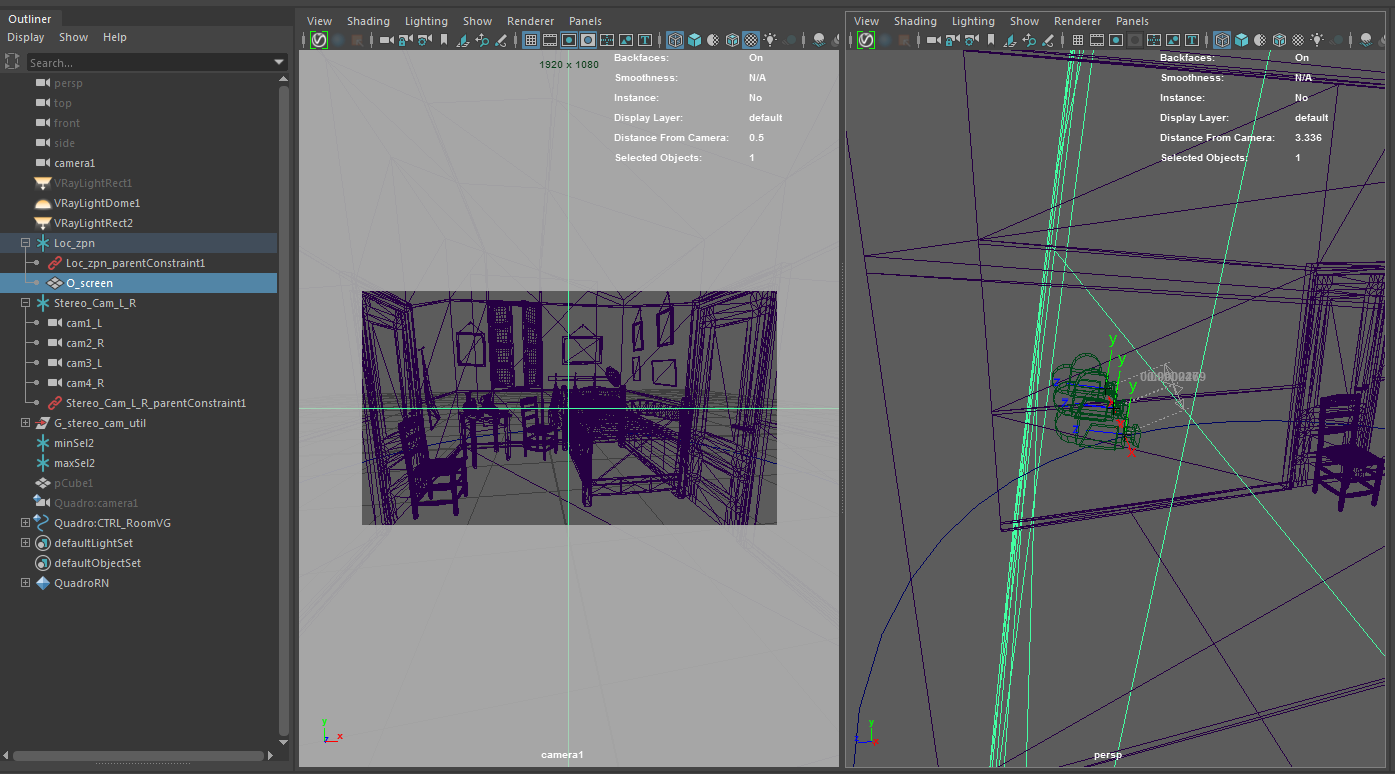
Using this rig I implemented a Python class that measures the single object disparity in Maya scene, but it can achieve the optical budget of the shot camera. See image below.
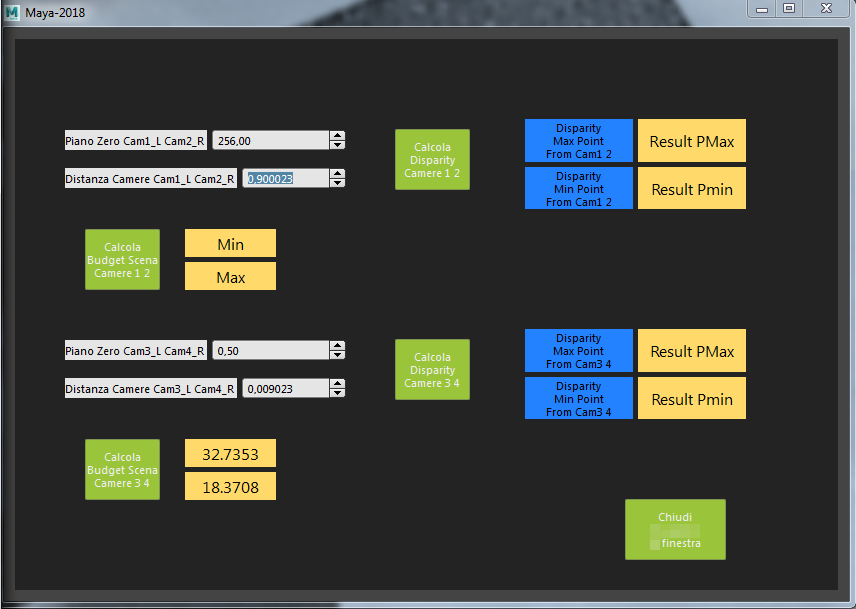
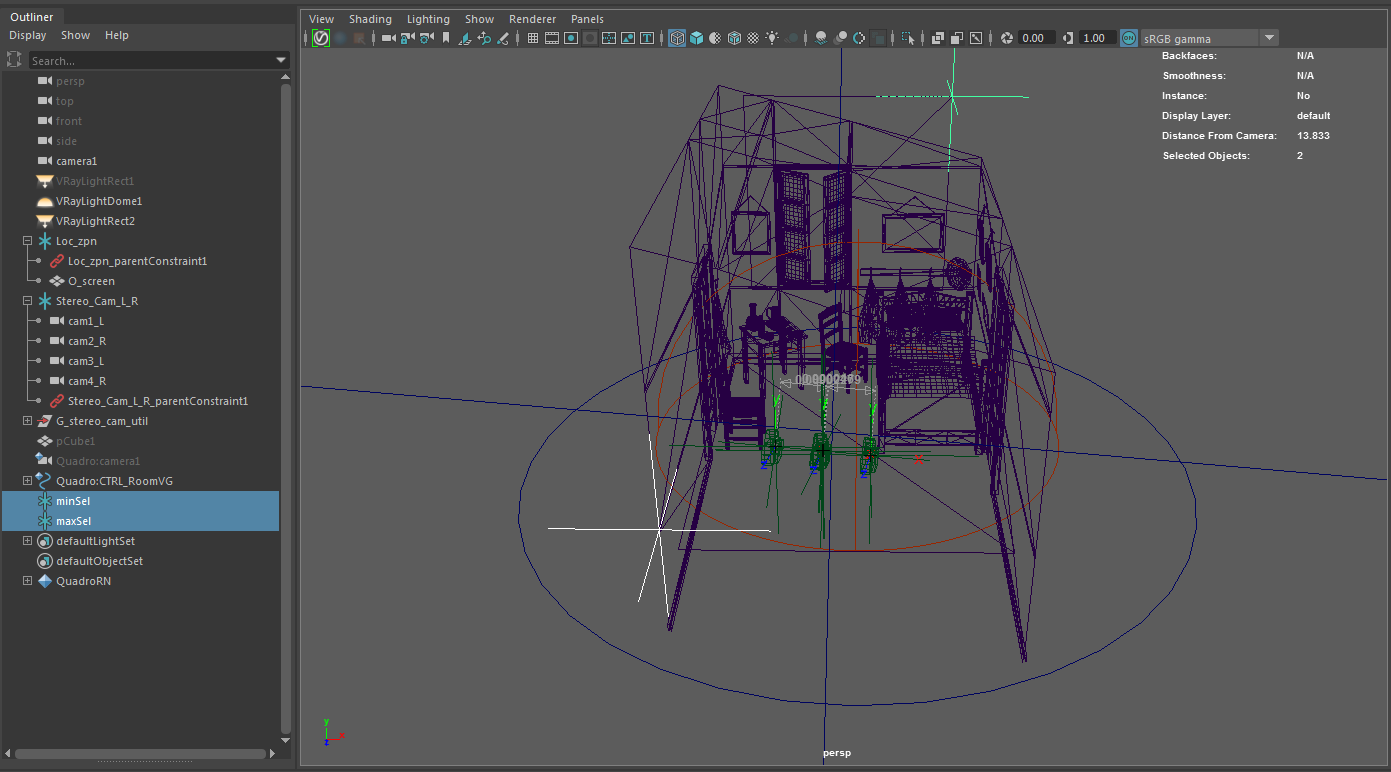
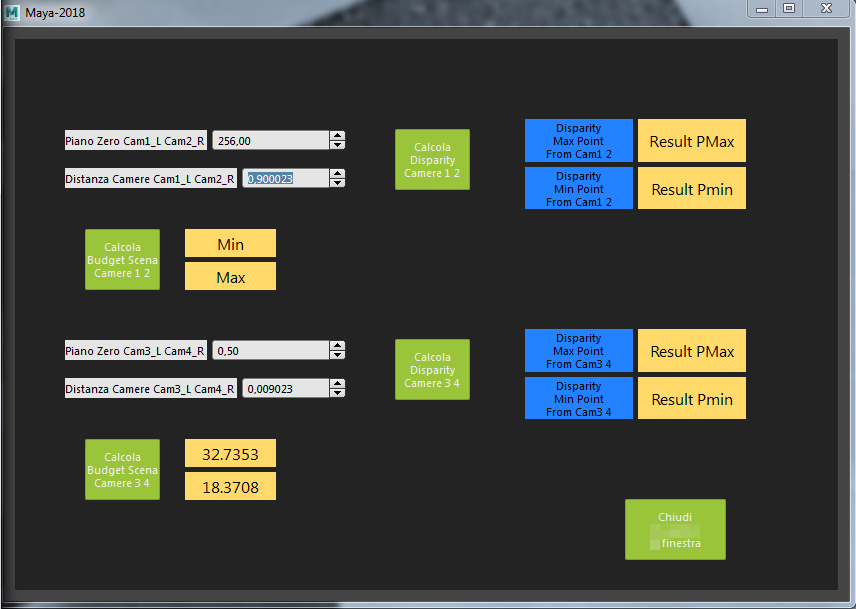
The tool marks the boundaries of the shot camera with two locators. They represent the minimum and maximum disparity in the scene. The image below shows a special case because the scene is all behind the zero plane, so the results in the interface window don’t show the negative value.
{kind=link}