Stereoscopy
In film and television the factor which triggers the process of depth perception is called disparity (or parallax).
Disparity is defined as the difference between the horizontal coordinates of a point (in a 3D space) on the stereo cameras's focal plane .
Generally, the X coordinate of the 3D projection point on the right camera is subtracted from the X coordinate of the 3D projection point on the left camera.
In the case of off-axis approach, i.e. frustum cameras that converge on a zero plane, the value is negative if the point is between the camera and the zero plane, whilst it is positive when beyond the zero plane.
With negative values the perception is that the object is closer to the viewer, whilst positive values are perceived around the screen, like looking through a window.
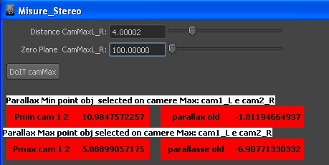
How I measured the disparity in the scene: The stereoNode.
1)I made a maya node linked to the rig of cameras. The node has as input:
- The names of the cameras.
- The distance between the cameras.
- The distance of the cameras to the zero plane.
- The horizzontal resolution of the picture.
Returns as output:
- The minimum and maximum disparity of the object's bounding box (or group) selected.
See pictures:
Pic.1 & Pic.2.
2) Noting the differences between these values, the values are written to a DB to get the perceived depth for every frame for that individual character, obtaining the DEPTH CHART. Pic.3
 Picture 1
Picture 1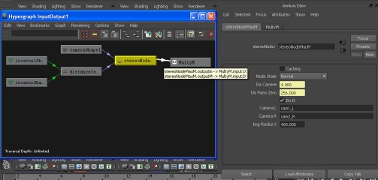 Picture 2
Picture 2 Picture 3
Picture 3